2021年12月8日,重庆大学机械与运载工程学院陈锐副教授课题组在Nature Communications上发表了题目为“可实现快速、连续及转向跳跃的无腿软体机器人”(Legless soft robots capable of rapid, continuous, and steered jumping)的研究论文。重庆大学为第一署名单位,陈锐、硕士研究生袁泽安,哈尔滨工业大学(深圳)郭江龙副教授,重庆大学柏龙教授为论文的共同第一作者,陈锐、上海大学蒲华燕教授为共同通讯作者。
跳跃运动可以有效拓展机器人的运动范围和越障性能,对于复杂环境中运行的移动机器人至关重要。然而,提升跳跃高度和跳跃距离等单次跳跃指标以提升机器人的越障性能与提升跳跃频率以提升机器人的运动速度往往是矛盾的。目前很少有机器人可以同时实现连续、快速以及灵活转向的高效跳跃。
该论文针对非结构化环境下软体机器人驱动效率低、可靠性不足的难题,提出高性能柔性电液驱动技术,并采用结构驱动一体化设计的方法,设计了一款可实现连续快速跳跃的软体机器人。该机器人质量只有1.1g,可以实现7.68倍自身高度的跳跃高度和每秒6.01倍体长的跳跃距离。将两个驱动器模块连接在一起组合成一个双体机器人,可以实现138.4°/s的转向速度,是目前已有软体跳跃机器人中最快的。两款机器人均具有很强的运动和越障能力,通过集成一些温度、湿度传感器,机器人可以进入一些狭窄非结构化环境中完成环境感知和探测任务。本论文的研究工作为非结构化环境下软体机器人的灵活移动提供了一种新的驱动方式和设计方法,为电液驱动技术在软体机器人上的推广应用奠定了基础。
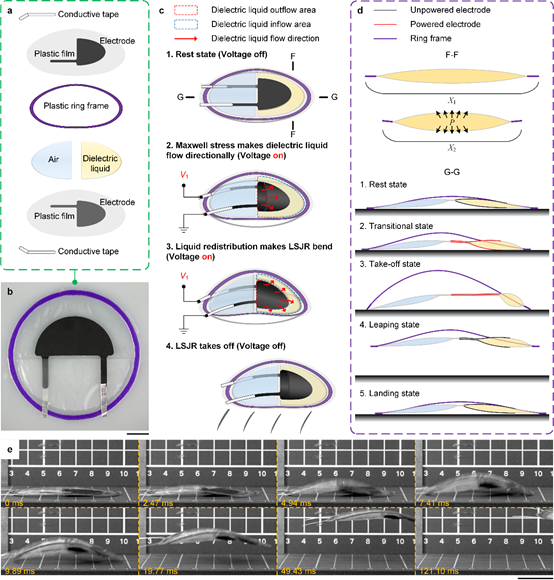
图示:(a)驱动器的结构组成。(b)机器人实物样机。(c)机器人的跳跃过程简图。(d)驱动器变形过程的截面图。(e)机器人跳跃过程的高速相机拍摄图。
该研究得到了国家重点研发计划项目、国家自然科学基金面上项目的支持。
论文链接:https://www.nature.com/articles/s41467-021-27265-w
